
[提要] :本文就异形玻璃幕墙的施工测量技术结合实际工程的测量技术和方案作了详细的介绍。特别是如何利用全站仪进行三维空间定位作了阐述。
[关键词]:三维坐标、全站仪、反射贴片、极坐标法、无仪高测量法
随着建筑业的发展以及建筑技术水平的提高,技术含量高、造型复杂、漂亮美观的玻璃幕墙工程越来越多。中关村软件园的玻璃大光盘、国家大剧院、北京植物园等一大批有个性、有创意的现代建筑,充分利用当今的玻璃幕墙施工技术来展示建筑大师们的美学思想。由于建筑形态的复杂性,给建筑幕墙的施工技术提出了更高的要求。在安装过程中,测量是一项专业性较强且又非常重要的工作。
一、 平面控制网和高程控制网的测设
1.1平面控制网的测设
首先,针对工程的特殊性按土建公司提供的控制点和有关起算数据,用SET2110全站仪分别进行两测回测角测距,检测无误后即将其作为该工程平面控制网的基准点和起算数据。
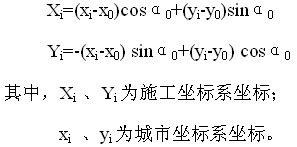
根据建筑轴线建立独立施工平面坐标系。
施工坐标与城市坐标的换算关系:
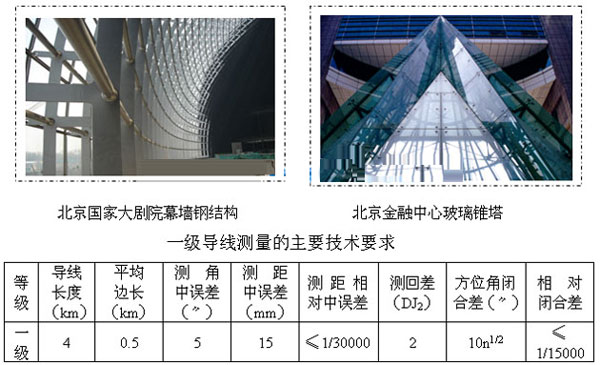
采用极坐标法,用全站仪放样出矩形平面控制点。用全站仪按一级导线技术要求,对控制点进行闭合导线测量,建立平面控制网。
1.2高程控制网的测设
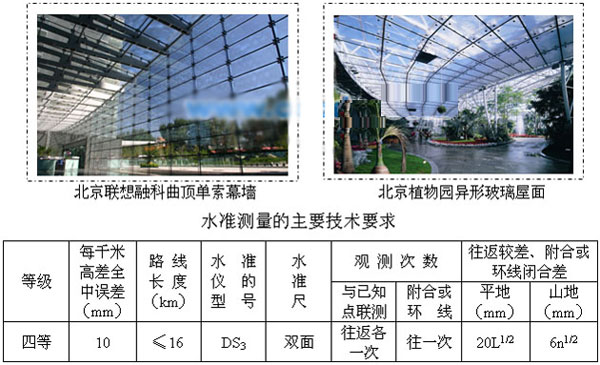
首先,对总包公司提供的施工现场控制点与城市水准进行联测,然后用DSG320自动补偿水准仪按照四等水准测量规范要求,把高程点引测到每个平面控制点上,并以此作为高程控制网。
二、全站仪三维坐标放样在异形玻璃幕墙安装中的应用
传统的经纬仪 钢尺测量法,是目前钢结构安装及校正测量所采用的普遍方法,其原理简单、直观,容易被大多数人所接受,但细部放线工作较多,工作量较大,对现场的通视条件要求较高,工程耗费大量的人力、物力,而且效率较低。在高新技术日益发展的今天,全站仪和计算机得到了广泛的应用,运用接口技术使二者相连,建立一套完整的全站仪实时测绘系统,对钢结构进行测量校正。
2.1基本原理
(1)根据工程的特点和平面图的具体情况,以工程独立施工坐标系为基准,计算各钢构柱中心和控制点在该坐标系下的理论坐标,运用极坐标原理对钢柱进行测量放样;
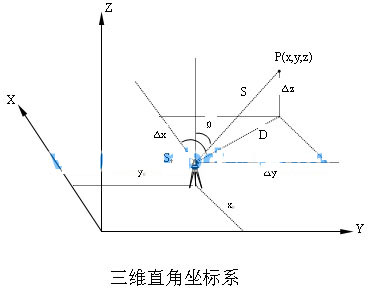
如下图所示,O(Xo,Yo,Zo)为测站点,P(Xp,Yp,,Zp)为放样点,io为仪高,vp为棱镜高,L为平距,S为斜距,V为天顶距,α为水平方向值,则P点相对测站点的放样参数为:

2)运用全站仪、反射贴片对已初步安装的钢构件进行三维坐标检测;检测结果与钢构件控制点的理论坐标进行比较;对误差超限的钢构件进行校正;

(3)运用全站仪、反射贴片对已安装完成的钢构件进行三维坐标实测,运用全站仪数据采集器、接口技术使全站仪和计算机二者相联,在计算机上建立准确的钢构件三维立体图,并以此作为玻璃下单的依据。
2.2全站仪三维定点的精度分析
全站仪测定空间某点P的三维坐标计算公式为:
X1=X0 SsinV?cosα
Y1=Y0 SsinV?sinα
Z=Z0 ScosV i (1)
设mα=mV=m0, ms=a b?D
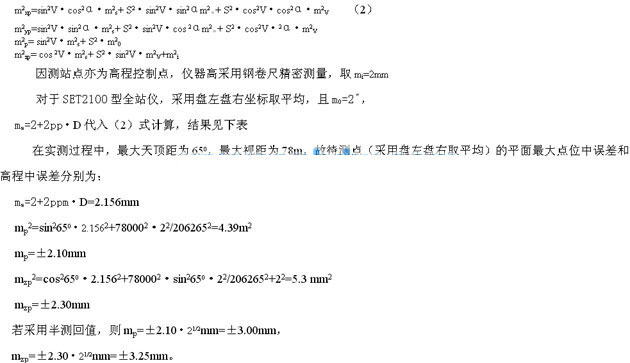
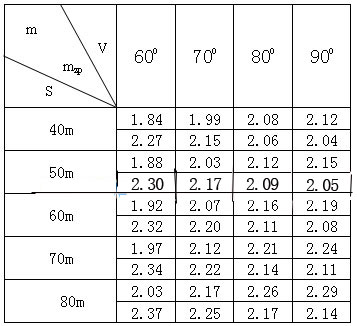
根据误差传播定律,得:
2.3无仪高测量法
精密全站仪测定目标点的三维坐标, 目标点标高是三角高程测得的。从以上精度分析中可看出,三角高程测量中仪器和目标高的误差是高程中误差的主要来源。用反射贴片代替棱镜基本可消除目标高误差,为确保精度并消除三角高程测量中量测仪器高的误差对观测成果影响,可采用了高程测量无仪高作业法。其基本原理是:假设测站高程为H0,仪器高为i,从测站观测第一个目标点设为已知高程点,高程为H1,目标高为0,则观测第一点的高程和传递表达式为:
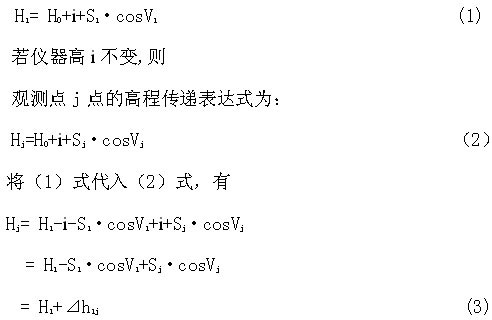
(3)式说明;第j点高程=已知高程H1 已知高程点至第j点的间接高差⊿h1j。由于h1或hj均为全站仪望远镜旋转中心至目标点的高差,并不涉及仪器高,故间接高差 h1j也与仪器高无关。根据这一原理,观测方案如下:
首先观测测站到基准点间的高差h1,然后将全站仪置于三维坐标测量状态,输入测站点的坐标X0,Y0,而Z0以虚拟高程H0(H0=基准点高程-h1)输入,仪器高,棱镜高均输入0。最后,测量起始方向即可进行观测。
三、结束语
(1)全站仪三维坐标放样法可以同时进行多根钢结构柱的放样、检校,提高了工作效率,提高了测量精度,在空间结构复杂的工程放样、检测中,应得到推广应用。
(2)在实际工程选用曲面玻璃的下单中,运用全站仪、反射贴片对已安装完成的钢结构进行实测,建立准确的钢结构电脑三维立体图,可保证下料单的精度,避免钢化玻璃因下单误差而造成的损失。
(3)全站仪三维坐标放样法的标高放样采用无仪高、反射贴片代替棱镜的三角高程测量,精度、效率较高,在空中定位测量有较好效果,在复杂的空中结构安装中较水准仪 钢尺法应用更便捷。
参考文献
① 《测量学》——武汉测绘学院
② 《点支式玻璃幕墙设计与施工》——王德勤
② 《点驳接索结构幕墙施工工艺》——王德勤
